ความเดิมจากตอนที่แล้ว…
พื้นฐานหุ่นยนต์ในงานอุตสาหกรรม ฉบับผู้ใช้งาน (ตอนที่ 1)
โครงสร้างตัวหุ่นยนต์ (Robot Structure)
จากตอนที่แล้วผมได้เกริ่นนำเกี่ยวกับเรื่องของระบบหุ่นยนต์อุตสาหกรรมให้กับทุกๆ ท่านทราบแล้วนะครับว่าสถานการณ์ในปัจจุบันนั้นกำลังมีการเปลี่ยนแปลงไปอย่างมาก การปรับตัวของภาคอุตสาหกรรมการผลิตเองก็ต้องมีการปรับตัว เพื่อให้สามารถแข่งขันได้ในตลาดธุรกิจ หุ่นยนต์อุตสาหกรรมที่นำมาช่วยในกระบวนการผลิตจึงเป็นอีกหนึ่งเทคโนโลยีเครื่องจักกลอัตโนมัติที่สำคัญเลยทีเดียว และในตอนที่ 2 จะเป็นการแนะนำให้ทุกท่านได้รู้จักกับหุ่นยนต์ในงานอุตสาหกรรมมากยิ่งขึ้น เพื่อเตรียมความพร้อมก่อนที่จะสามารถโปรแกรมการทำงานของมันได้ นั่นก็คือ โครงสร้างของตัวหุ่นยนต์และลักษณะการเคลื่อนที่ของหุ่นยนต์นั่นเอง ทั้งนี้ จากที่ทุกท่านทราบกันแล้วนะครับว่าองค์ประกอบของระบบการควบคุมหุ่นยนต์พื้นฐานนั้นจะมีอยู่ด้วยกัน 3 ส่วน ประกอบด้วย
- ตัวหุ่น หรือ Robot Boy หรือ Manipulator
- อุปกรณ์ควบคุมหุ่นและโปรแกรมหุ่น (Programming Pendent)
- Controller & Amplifier Set
องค์ประกอบทั้ง 3 ส่วนที่กล่าวมาข้างต้นนั้นเรียกได้ว่าเป็นสิ่งที่สำคัญมาก เพราะเนื่องจากการควบคุมการทำงานของหุ่นยนต์หรือการโปรแกรมหุ่นยนต์ให้สามารถทำงานได้นั้น จะต้องมีความรู้ในข้อมูลที่เกี่ยวกับรายละเอียดที่สำคัญของตัวหุ่นยนต์ด้วยจึงจะสามารถโปรแกรมหุ่นยนต์ได้อย่างถูกต้อง สำหรับตอนนี้จะขอกล่าวถึงรายละเอียดในส่วนขององค์ประกอบตัวแรก คือ ‘ตัวหุ่นยนต์’
โครงสร้างตัวหุ่นยนต์
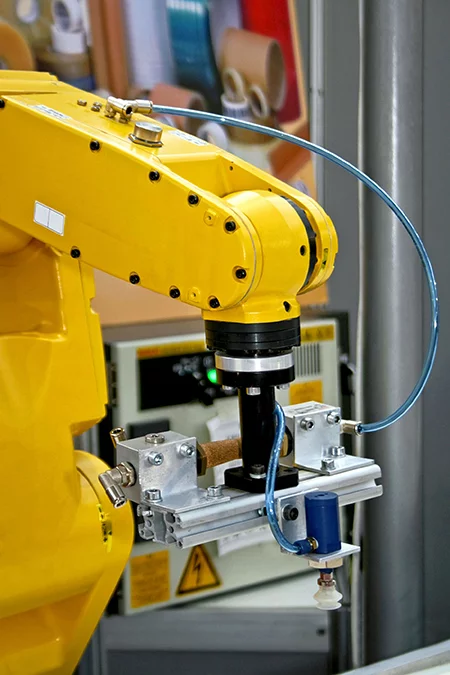
ตัวหุ่นยนต์ (Robot Body / Manipulator) เป็นส่วนที่สำคัญที่สุด เพราะเวลาที่เราจะพิจารณาเลือกใช้หุ่นยนต์สักตัวเพื่อทำมาใช้ช่วยในกระบวนการผลิตจะต้องคำนึงถึงลักษณะของงาน พื้นที่ สิ่งแวดล้อม เนื่องจากตัวหุ่นยนต์นั้นเป็นส่วนที่ต้องนำมาใช้ในกระบวนการทำงานอยู่ตลอดเวลา ซึ่งลักษณะงานที่แตกต่างกันก็จะเป็นตัวบ่งบอกในเรื่องของขนาดโครงสร้างของตัวหุ่นยนต์ด้วย ซึ่งตรงนี้หลายๆ ท่านอาจนึกภาพออก ซึ่งถ้าเปรียบเทียบกับคน หากคนที่ตัวเล็กอาจยกของได้น้อยกว่าคนตัวใหญ่นั่นเอง ดังนั้น เราจึงต้องมาศึกษาให้เข้าใจเกี่ยวกับโครงสร้างของตัวหุ่นยนต์ก่อนว่าประกอบไปด้วยอะไรบ้าง เพราะหากเราไม่ทราบเราก็จะไม่สามารถโปรแกรมหุ่นยนต์ให้ทำงานได้ ที่สำคัญ คือ เราจะคุยกับคนอื่นไม่รู้เรื่องอีกด้วย

จากภาพด้านบนเป็นภาพแสดงให้เห็นถึงตัวอย่างของตัวหุ่นยนต์ (Robot Body) ยี่ห้อต่างๆ ในตลาดหุ่นยนต์ จะเห็นได้ว่าถึงแม้จะต่างยี่ห้อกัน แต่ลักษณะของโครงสร้างจะมีลักษณะโครงสร้างที่เหมือนกัน ความแตกต่างจะอยู่ที่ลักษณะของการ Design เท่านั้น โดยโครงสร้างที่สำคัญถูกออกแบบมาจะประกอบด้วยส่วนของท่อนแขนหรือ ‘Link’ และส่วนของข้อต่อหรือ ‘Joint’ และลักษณะโครงสร้างของหุ่นยนต์ทั้ง 2 ส่วนนั้น ยังเป็นตัวกำหนดชนิดของหุ่นยนต์ตามที่กล่าวไว้ในตอนที่ 1 อีกด้วย
Link & Joint
Link & Joint เป็นโครงสร้างหลักของตัวหุ่นยนต์ ซึ่งทั้งสองส่วนนี้จะเป็นส่วนที่เราต้องทำการโปรแกรมให้หุ่นยนต์เกิดการเคลื่อนที่และจะทำงานสัมพันธ์กันตามโปรแกรมที่ User กำหนดไว้
Link คือ โครงสร้างของหุ่นยนต์ที่เป็นท่อนแขน มีหน้าที่ในการเข้าสู่พื้นที่การทำงาน โดยความยาวของ Link จะเป็นตัวบ่งบอกสมรรถนะของตัวหุ่นยนต์ และความสามารถในการเข้าสู่พื้นที่การทำงานด้วย หุ่นยนต์อุตสาหกรรมชนิด Articulate Robot จะมี Link อยู่จำนวน 2 Link ดังนี้
a. Link ท่อนบน หรือ Upper Link เป็นส่วนของท่อนแขนบนสำหรับเข้าสู่พื้นที่การทำงาน และเป็นส่วนที่เชื่อมต่อกับข้อมือ Robot Hand สำหรับติดตั้ง Robot Tool
b. Link ท่อนล่าง หรือ Lower Link เป็นส่วนของท่อนแขนที่ทำหน้าที่ในการรับน้ำหนักทั้งหมดที่เกิดขึ้นของตัวหุ่นทั้งหมดเป็นส่วนที่รองรับน้ำหนักของแขนท่อนบนและเชื่อมต่ออยู่กับฐาน Base ของหุ่นยนต์
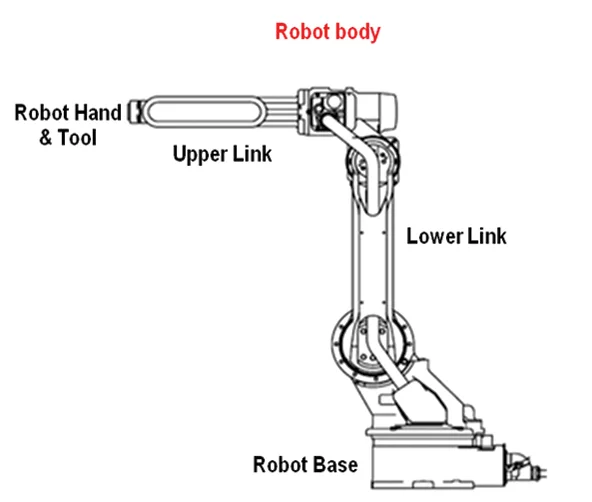
ตามที่ทราบกันในเบื่องต้นแล้วว่าหุ่นยนต์อุตสาหกรรมชนิด Articulate Robot นั้น ถูกออกแบบมาให้มีลักษณะคล้ายกับแขนของมนุษย์ ดังนั้นเพื่อให้ง่ายต่อการทำความเข้าใจเกี่ยวกับเรื่องของ Link ทั้ง 2 ส่วน จึงขอเปรียบเทียบกับแขนของมนุษย์ตามตารางที่ 1
ตารางที่ 1 : ตารางเปรียบเทียบระหว่างโครงสร้าง Link ของหุ่นยนต์และ แขนของมนุษย์
| หุ่นยนต์ | แขนมนุษย์ |
| 1. ฐานหุ่นยนต์ (Robot Base) | 1. ส่วนของเอว |
| 2. แขนท่อนล่าง (Lower Link) | 2. ส่วนของท่อนแขนตั้งแต่หัวไหล่ถึงข้อศอก |
| 3. แขนท่อนบน (Upper Link) | 3. ส่วนของท่อนแขนตั้งแต่ข้อศอกถึงข้อมือ |
| 4. มือหุ่นยนต์ (Robot Hand) | 4. ส่วนตั้งแต่ข้อมือถึงกลางฝ่ามือ |
| 5. เครื่องมือ (Robot Tools) | 5. นิ้วมือ |
Joint คือ โครงสร้างของหุ่นยนต์ส่วนที่เป็นข้อต่อที่ทำหน้าที่ในการเชื่อมต่อระหว่าง Link ของตัวหุ่นยนต์และยังทำหน้าที่ในการเคลื่อนที่ของตัวหุ่นยนต์ให้สามารถเคลื่อนที่ไปยังตำแหน่งต่างๆ ที่เราต้องการ กล่าวคือ การที่เราทำการโปรแกรมหุ่นยนต์ให้เคลื่อนที่ ก็คือ การโปรแกรมการทำงานของ Joint หรือข้อต่อทั้งหมดของหุ่นยนต์ นั่นหมายความว่า ส่วนของ Joint คือ ส่วนที่ทำการติดตั้ง Servo Motor ไว้นั่นเอง โดยปกติแล้ว หุ่นยนต์อุตสาหกรรมชนิด Articulate Robot จะมีข้อต่อ หรือ Joint ทั้งหมด 6 Joint หรือบางครั้งคนที่อยู่ในวงการการควบคุมหุ่นยนต์ มักเรียกว่าหุ่นยนต์ 6 แกน (6 Axis) ดังแสดงในรูปที่ 3
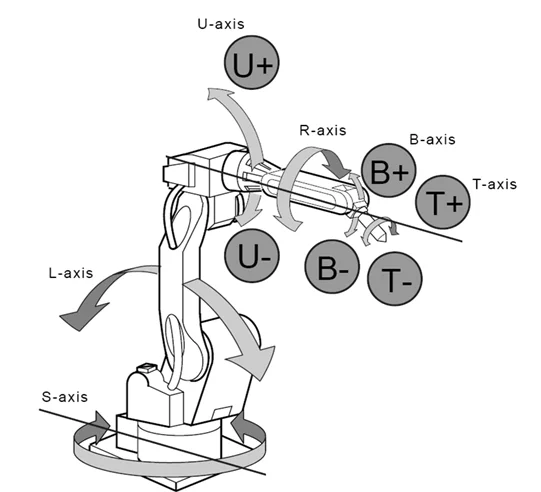
จากรูปที่ 3 แสดงให้เห็นถึงข้อต่อหรือ Joint ของหุ่นยนต์ซึ่งมีอยู่ด้วยกันทั้งหมด 6 Joint ด้วยกัน โดยมีชื่อเรียกและหน้าที่ของแต่ละ Joint และเปรียบเทียบกับแขนของมนุษย์ได้ตามตารางที่ 2
ตารางที่ 2 : ชื่อเรียกและหน้าที่ของแต่ละ Joint และเปรียบเทียบกับแขนของมนุษย์
| หุ่นยนต์ | เทียบเคียงความหมายกับมนุษย์ | ||
| Axis or Joint No. | Name | Description | |
| Axis 1 or Joint 1 | S | Rotation of the complete manipulator | ส่วนเอวเอว |
| Axis 2 or Joint 2 | L | Forward and reverse movement the lower arm. | ส่วนหัวไหล่ |
| Axis 3 or Joint 3 | U | Vertical movement of the upper arm. | ส่วนข้อศอก |
| Axis 4 or Joint 4 | R | Rotation of the complete wrist centre. | ส่วนหมุนแขนท่อนบนจนถึงข้อมือ |
| Axis 5 or Joint 5 | B | Bending of wrist around the wrist centre. | ส่วนข้อมือ |
| Axis 6 or Joint 6 | T | Rotation of mounting flange(turn disc) | ส่วนหมุนข้อมือ |
จากข้อมูลที่กล่าวมาทั้งหมดทุกท่านอาจจะมองเห็นภาพโครงสร้างของตัวหุ่นยนต์กันแล้วนะครับ ซึ่งเจ้าตัวโครงสร้างของหุ่นยนต์ทั้งสองส่วนที่กล่าวมานั้น มีความสำคัญต่อการโปรแกรมการทำงานของหุ่นยนต์มาก เพราะอย่างที่ได้กล่าวมาแล้วว่าการควบคุมโปรแกรมหุ่นยนต์ ก็คือ การสั่งให้โครงสร้างทั้งสองส่วนนี้เกิดการเคลื่อนที่เพื่อทำงานตามที่เราต้องการนั่นเอง ในตอนหน้าจะนำเสนอให้ทุกท่านได้รู้จักกับองค์ประกอบในระบบควบคุมหุ่นยนต์ที่เหลืออีก 2 ส่วน เพื่อที่จะได้เริ่มเรียนรู้การโปรแกรมเบื้องต้นกันนะครับ โปรดติดตาม สำหรับตอนนี้ขอจบเรื่องราวของโครงสร้างตัวหุ่นยนต์ไว้เท่านี้ ขอบคุณที่ติดตามนะครับ สวัสดีครับ…
บทความที่เกี่ยวข้อง