การฝึกฝนให้หุ่นยนต์สามารถทำความเข้าใจกับวัตถุต่าง ๆ อาจเป็นเรื่องง่ายขึ้นเมื่อใช้ AI และ Super Computer มาช่วยสังเคราะห์รูปร่างของวัตถุเพื่อให้หุ่นยนต์สามารถรับรู้ได้ง่ายดายยิ่งขึ้นด้วยการเรียนรู้จากตัวอย่างจำนวนมหาศาลในเวลาที่น้อยลงอย่างมาก

เพื่อการนำทางภายใต้สภาพแวดล้อมที่ถูกสร้างขึ้นมาหุ่นยนต์จำเป็นต้องรับรู้และตัดสินใจว่าจะตอบสนองต่อตำแหน่งที่อยู่อย่างไร นักวิจัยจากโดยมากได้ใช้ Machine และ Deep Learning เพื่อนฝึกให้หุ่นยนต์เรียนรู้เกี่ยวกับวัตถุต่าง ๆ แต่การทำเช่นนั้นได้จำเป็นต้องมีชุดข้อมูลภาพจำนวนมหาศาล ในขณะที่มีรูปภาพและวิดีโอนับล้าน ๆ ภาพของห้อง แต่กลับไม่มีสักมุมเดียวที่ถูกถ่ายจากมุมมองที่หุ่นยนต์ต้องเจอ ยกตัวอย่างเช่น หุ่นยนต์ดูดฝุ่น การฝึกฝนด้วยภาพที่มีมุมมองมนุษย์เป็นศูนย์กลางนั้นถือว่าล้มเหลวอย่างสิ้นเชิง
แต่นักวิจัยจาก University of Texas ที่ Arlington ได้ลงลึกในเรื่องของหุ่นยนต์ Computer Vision และระบบ Cyber-Physical โดยให้ความสำคัญกับการพัฒนา Algorithm ที่ทำให้เครื่องจักเรียนรู้จากการปฏิสัมพันธ์ของตัวเองกับโลกกายภาพและได้ทักษะที่จำเป็นต่อการจัดการต่อภาระหน้าที่ระดับสูงได้โดยอัตโนมัติผ่านการเรียนรู้
ด้วย Roomba Training Problem ทีมวิจัยได้เริ่มค้นหาโซลูชันที่ต้องการขึ้น ด้วยการใช้กล้อง 360 องศาราคาแพงเพื่อจับภาพสิ่งแวดล้อมและซอฟต์แวร์ที่ถูกออกแบบมาเป็นพิเศษเพื่อเชื่อมต่อภาพเหล่านี้เข้าด้วยกันเป็นภาพเดียวแทนที่จะใช้การเก็บภาพแบบ Manual ทั้งหมด ซึ่งจะช้าเกินไป
ด้วยการสร้าง Deep Learning ที่เรียกกันว่า Generative Adversarial Networks หรือ GANs ที่ซึ่ง 2 เครือข่าย Neural Networks ประชันแข่งขันกันเองในเกมส์จนกระทั่ง ‘ฝ่ายสร้าง’ ซึ่งผลิตข้อมูลใหม่สามารถหลอก ‘ผู้ตรวจคัดแยก’ ได้ เมื่อได้รับการฝึกฝนแล้วระบบเครือข่ายเหล่านี้สามารถสร้างสภาพแวดล้อมในห้องหรือสภาพแวดล้อมภายนอกได้อย่างไม่จำกัดด้วยจำนวนเก้าอี้ โต๊ะ หรือยานยนต์ที่แตกต่างกันออกไปเล็กน้อยเพื่อให้เกิดการเรียนรู้ที่ละเอียดมากขึ้น แต่อย่างไรก็ตามสำหรับมนุษย์และหุ่นยนต์จะสามารถระบุวัตถุได้ด้วยการจดจำมิติและคุณลักษณะพิเศษ
ในกรณีของการออกแบบปรับแต่งเล็กน้อยไม่ว่าจะเป็นการขยับวัตถุ เปลี่ยนมุม หรือรายละเอียดยิบย่อยเหล่านี้นั้นใช้เวลาจำนวนมหาศาลจากจำเป็นต้องใช้แรงงานคนดำเนินการ หากเกิดการฝึกฝนที่ถูกต้องแล้วระบบ Generative Network สามารถจัดการให้เกิดขึ้นได้ในเวลาเพียงไม่กี่วินาที
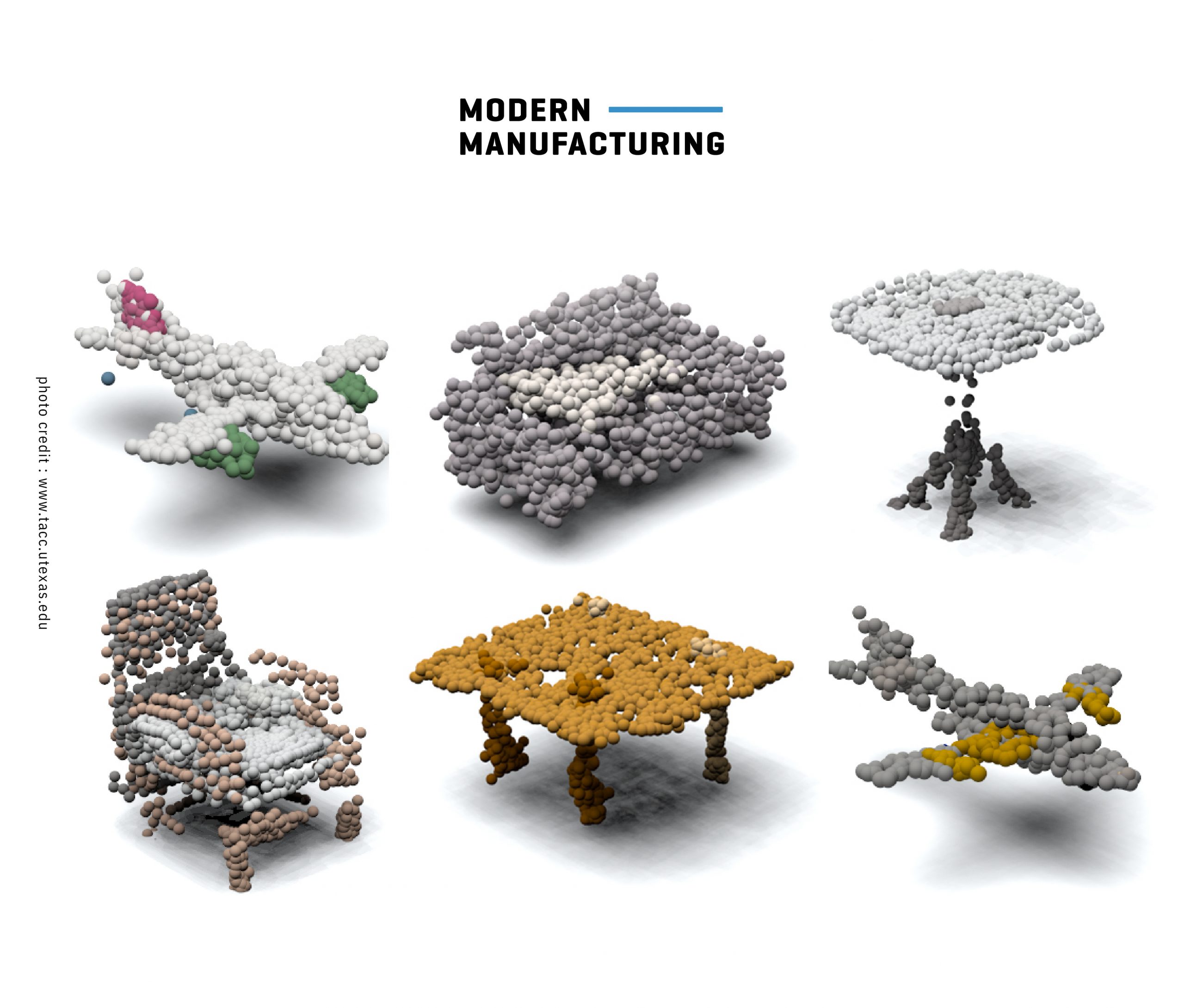
จากเอกสารงานวิจัย A Progressive Conditional Generative Adversarial Network for Generating Dense and Colored 3D Point Clouds ที่ถูกเผยแพร่ในงาน International Conference on 3D Vision (3DV) เมื่อเดือนพฤศจิกายนปี 2020 ของทีมวิจัยแสดงให้เห็นว่าการเรียนรู้จากชุดข้อมูลฝึก (จาก ShapeNetCore หรือฐานข้อมูลโมเดล CAD) และลอกเลียนข้อมูล 3 มิติเพื่อสร้างจุดสีเป็นกลุ่มก้อนเมฆที่มัรายละเอียดหลากหลายแตกต่างกันไป
แม้ว่าจะมีงานวิจัยที่คล้ายคลึงกันออกมาบ้างแล้วแต่กลับพบว่ามีปัญหาในการใช้งาน ‘สี’ เพื่อทดสอบวิธีที่ทีมวิจัยใช้กับความหลากหลายของรูปทรง ทีมวิจัยได้เลือกเก้าอี้ โต๊ะ โซฟา เครื่องบินและจักรยานยนต์เพื่อทำการทดสอบ เครื่องมือที่มีทำให้ทีมวิจัยสามารถเข้าใกล้สิ่งที่เรียกได้ว่ารูปแบบของวัตถุเหล่านี้ที่แทบจะเป็นอนันต์ที่ถูกสร้างขึ้นมาจากระบบ
โมเดลที่ถูกออกแบบมานั้นจะเรียนรู้เกี่ยวกับโครงสร้างพื้นฐานก่อนเป็นอย่างแรก ด้วยความละเอียดที่ต่ำและการสร้างรูปทรงในระดับที่รายละเอียดเพิ่มมากขึ้นเรื่อย ๆ ควาสมพันธ์ระหว่างชิ้นส่วนของวัตถุและสี เช่น ขาของเก้าอี้จะมีสีเดียวกันในขณะที่ที่นั่งจะมีสีที่แตกต่างกันออกไป สิ่งเหล่านี้เป็นการเรียนรู้ด้วยระบบทั้งสิ้น เรียกได้ว่าเป็นการเรียนรู้จากจุดเล็ก ๆ และสร้างลำดับขั้นตอนการสังเคราะห์ฉากหรือสถานการณ์ขึ้นอย่างเต็มรูปแบบซึ่งจะเป็นประโยชน์ต่อการเรียนรู้ของหุ่นยนต์
ด้วยการสร้างตัวอย่างกว่า 5,000 ตัวอย่างสำหรับแต่ละชั้นเรียนและทำการประเมินโดยใช้วิธีที่แตกต่างกันทำให้สามารถประเมินรูปทรงเรขาคณิตของกลุ่มเมฆได้ตลอดจนถึงการใช้สีสันที่มีจุดร่วมกันหลายตำแหน่งในพื้นที่ แสดงให้เห็นว่า PCGAN นั้นสามารถสังเคราะห์กลุ่มจุดเมฆคุณภาพสูงเพื่อแบ่งแยกวัตถุในชั้นเรียนของหุ่นยนต์ได้
อีกหนึ่งสิ่งที่ทีมวิจัยกำลังพัฒนา คือ Sim2real แนวคิดของการมีข้อมูลจริงที่ใช้ฝึกและข้อมูลฝึกแบบสังเคราะห์ AI หรือหุ่นยนต์สามารถเรียนรู้ได้จากความแตกต่างของทั้งสองสิ่งนี้ Sim2real นั้นมองหาวิธีในการบอกจำนวนความแตกต่างนั้นและทำให้การจำลองสมจริงยิ่งขึ้นโดยการจับเอาหลักฟิสิกส์ของฉากนั้น ๆ ไม่ว่าจะเป็นรอยแตก รอบสึกหรอ หรือแรงดึงดูดด้วยการใช้แสงหรือ Photon Tracing
ขั้นตอนต่อไปของทีมวิจัยคือการใช้ซอฟต์แวร์นี้บนหุ่นยนต์และสังเกตความสมพันธ์ของช่องว่างใน Sim2real ที่เกิดขึ้นและทำการพัฒนาต่อยอดออกไป
ที่มา:
Tacc.utexas.edu
| บทความที่เกี่ยวข้อง: AI จะช่วยให้กิจกรรมการผลิตปลอดภัยท่ามกลางการระบาดใหญ่ได้อย่างไร? |