สวัสดีเพื่อน ๆ ชาว Modern Manufacturing อีกครั้งครับ ครั้งนี้จะค่อนข้างต่อเนื่องกว่าครั้งที่ผ่านมาเนื่องจากผมอยากให้ท่านได้อ่านบทความในช่วงเคอฟิวส์ แต่บทความตั้งแต่ EP.06 เป็นต้นไปนี่จะเป็นด้านเทคนิคของการใช้งานมอเตอร์ชนิดต่างๆกับยานยนต์ไฟฟ้าครับ

อาจจะน่าปวดหัวสักหน่อยแต่ในอนาคตจะเป็นข้อมูลรายละเอียดที่ดีสำหรับนักศึกษาและผู้ที่สนใจ อันที่จริงผมอยากจะเขียนบทความเกี่ยวกับ เครื่องมือทดสอบทางไฟฟ้า Industrial PLC และ Industrial PC แต่ก็คงต้องหลังจากที่งานเขียนในเรื่องยานยนต์ไฟฟ้าจบลงแล้ว อาจจะเป็นสิบ EP ก็ติดตามอ่านกันต่อไปครับ
อินเวอเตอร์สำหรับมอเตอร์เหนี่ยวนำ
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
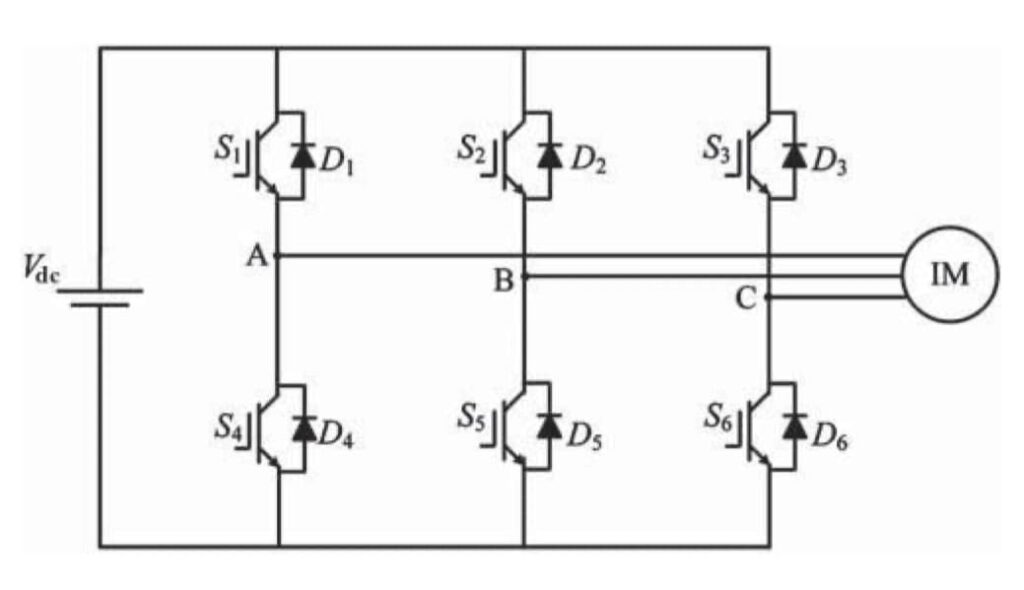
อินเวอเตอร์สำหรับมอเตอร์เหนี่ยวนำแบ่งเป็นชนิด Voltage-Fed กับ Current-Fed แต่เนื่องจากการสร้างแหล่งจ่ายกระแสต้องใช้ตัวเหนี่ยวนำอนุกรมขนาดใหญ่จึงไม่นิยมนำเอาอินเวอเตอร์ชนิด Current-Fed มาขับเคลื่อนยานยนต์ไฟฟ้า อินเวอเตอร์ชนิด Voltage-Fed ออกแบบได้ง่ายและถ่ายกำลังได้ 2 ทาง วงจรพื้นฐานของอินเวอเตอร์ 3 เฟสชนิด Voltage-Fed แบบ Full-Bridge แสดงในรูปที่ 1 รูปคลื่นด้านขาออกอาจเป็นแบบ 6-Step หรือ PWM ก็ได้ขึ้นอยู่กับว่าจะนำไปใช้กับอะไร อินเวอเตอร์แบบ 6-Step มีข้อดีคือง่ายและความสูญเสียในสวิตซ์ต่ำ แต่ที่ไม่นำมาใช้งานกันก็เนื่องมาจากไม่สามารถควบคุมขนาดของรูปคลื่นได้โดยตรงและฮาร์มอนิคส์ออเดอร์ต่ำมีค่าสูง ในทางตรงกันข้ามอินเวอเตอร์ชนิด PWM มีการใช้งานกันอย่างกว้างขวางเนื่องจากรูปคลื่นมีฮาร์มอนิคส์ไม่สูงเกินไปและสามารถควบคุมขนาดของรูปคลื่นและความถี่เพื่อใช้ควบคุมความเร็วได้อย่างราบรื่น
การออกแบบอินเวอเตอร์นั้นขึ้นอยู่กับเทคโนโลยีของอิเล็กทรอนิกส์กำลังเป็นสำคัญ ปัจจุบันการออกแบบอินเวอเตอร์สำหรับยานยนต์ไฟฟ้านิยมใช้ Insulated-Gate Bipolar Transistor (IGBT) เป็นส่วนใหญ่ ในการเลือกใช้งานอุปกรณ์อิเล็กทรอนิกส์กำลังนั้นต้องเลือกพิกัดของอุปกรณ์ดังนี้ พิกัดแรงดันอย่างน้อย 2 เท่าของแรงดันแบตเตอรี่เนื่องจากต้องคำนึงถึงแรงดันขณะสวิตซ์ด้วย พิกัดกระแสต้องมากพอโดยไม่ต้องนำอิเล็กทรอนิกส์กำลังมาต่อขนานกันหลาย ๆ ตัว ความเร็วในการสวิตซ์ต้องสูงมากพอเพื่อลดฮาร์มอนิคส์และลดเสียงรบกวน นอกจากนี้อิเล็กทรอนิกส์กำลังต้องเป็นแบบ Two-in-One หรือ Six-in-One เพื่อลดการเดินสายและลดค่า Stray Impedance ให้น้อยที่สุด
อินเวอเตอร์ชนิด PWM (Pulse Width Modulation)
เป็นเวลามากกว่า 2 ทศวรรษแล้วที่มีการใช้งานหลักการสวิตซ์แบบ PWM เพื่อนำมาใช้กับอินเวอเตอร์ชนิด Voltage-Fed โดยใช้ข้อกำหนดที่ว่าขนาดและความถี่ของรูปคลื่นมูลฐาน (Fundamental) ขาออกต้องเปลี่ยนแปลงอย่างราบรื่น มีความเพี้ยนฮาร์มอนิคส์ต่ำ อัลกอริทึ่มของการสวิต์สามารถทำได้เป็นปัจจุบันทันทีโดยใช้ฮาร์ดแวร์น้อยและซอฟแวร์มีขนาดเล็กและทนทานต่อการกระเพื่อมของแรงดันแบตเตอรี่ หลักการสวิตซ์แบบ PWM สามารถจัดรูปแบบได้ทั้ง Voltage-Controlled และ Current-Controlled แต่ส่วนใหญ่ในไดร์ฟมอเตอร์เหนี่ยวนำสมรรถนะสูงจะใช้งานรูปแบบ Current-Controlled เสียมากกว่าเพราะทอร์กและฟลั๊กซ์สามารถควบคุมด้วยกระแสได้โดยตรง
รูปแบบการสวิตซ์ PWM ที่มีการใช้งานกันสำหรับอินเวอเตอร์ชนิด Voltage-Fed มีหลากหลายชนิดแต่ที่มีการนำมาใช้กับไดร์ฟมอเตอร์เหนี่ยวนำสำหรับระบบขับเคลื่อนยานยนต์ไฟฟ้ามี 2 ชนิด คือ Hysteresis-Current และ Space-Vector
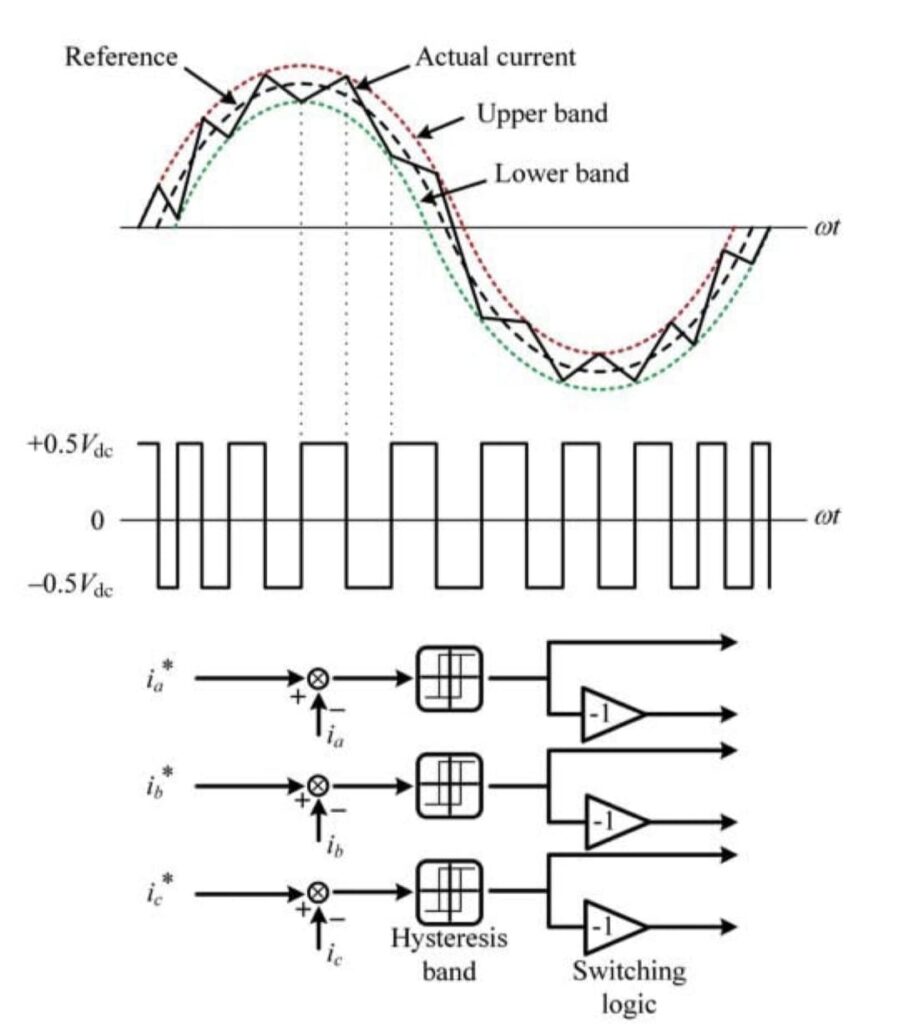
รูปที่ 2 แสดงหลักการของ Hysteresis-Current PWM ดังนี้
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
นำค่ากระแสที่วัดได้มาเปรียบเทียบกับกระแสอ้างอิง เมื่อกระแสที่วัดได้เกินกว่าขีดจำกัดที่ตั้งไว้ให้สวิตซ์ช่วงบนเปิดวงจร เป็นผลให้กระแสลดลงแต่ถ้าค่ากระแสที่วัดได้ต่ำกว่าขีดจำกัดล่างก็ให้สวิตซ์ช่วงบนปิดวงจรเป็นผลให้กระแสสูงขึ้น ดังนั้นค่ากระแสจริงจึงถูกบังคับให้ไต่ไปตามรูปคลื่นของกระแสอ้างอิงโดยอยู่ในช่วงขีดจำกัดบนและขีดจำกัดล่าง หลักการนี้มีข้อดีอย่างมากในการควบคุมกระแสโดยตรงและมีความรวดเร็วสูง แต่ก็ยังมีข้อเสีย คือความถี่ของ PWM เปลี่ยนแปลงไปตามโหลดซึ่งมีผลทำให้ค่ากระแสฮาร์มอนิคส์ไม่คงที่ อีกทั้งกระแสที่ความถี่มูลฐานจะน้อยลงเนื่องจาก Phase Lag
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
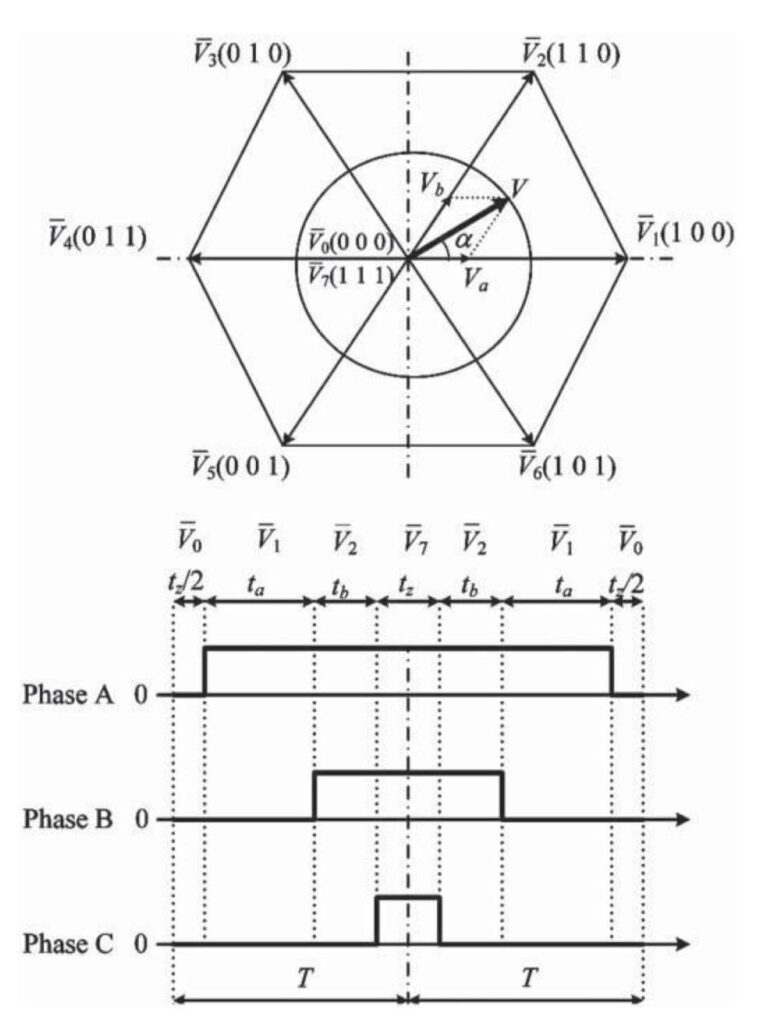
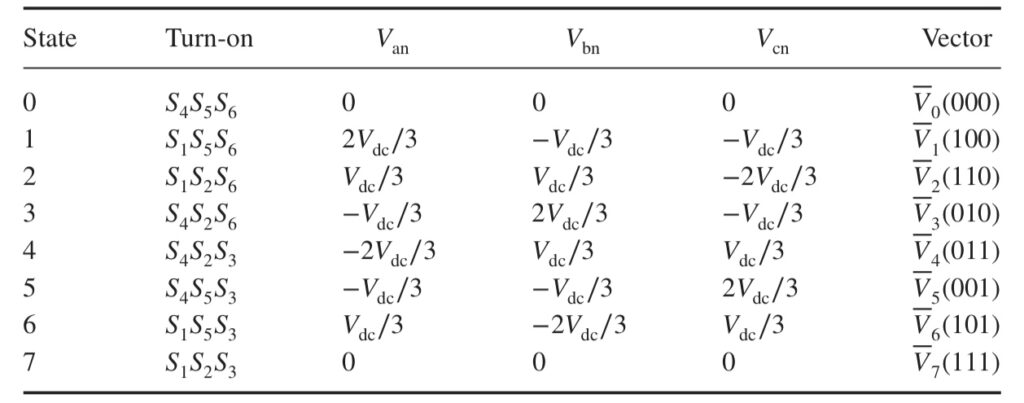
รูปที่ 3 แแสดงหลักการ PWM แบบ Space-Vector ซึ่งเป็นการควบคุมมอเตอร์โดยอ้อม ใช้หลักการ Space-Vector ของแรงดันกับกระแสตามสถานะในตารางรูปที่ 4 ตามรูป
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
มีเวกเตอร์ 6 ตัวห่างกัน 60 องศา คือ

เป็นมุมของรูป 6 เหลี่ยมมีขนาด 2Vdc/3 โดยมีเวกเตอร์ศูนย์ 2 ตัวที่จุดศูนย์กลางคือ
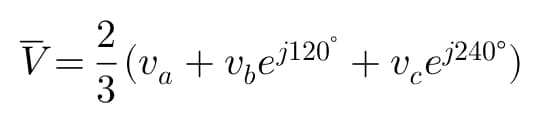
แรงดันเฟสที่แต่ละจุดของการสวิตซ์จะนำมารวมกันเพื่อให้ได้ Space Vector ของแรงดันตามสมการ
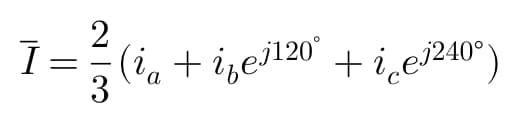
เช่นเดียวกัน space vector ของกระแสเป็นไปตามสมการ
เมื่อมีการวัดค่ากระแสแต่ละเฟสทุก ๆ คาบ T ก็จะนำค่ากระแสที่ได้มาคำนวณ Space Vector ของกระแสแต่ละเฟสและนำค่าความแตกต่างเวกเตอร์ลัพธ์ของกระแสมาลดค่า Space Vector ของแรงดันลง แต่เนื่องจากอินเวอเตอร์ทำงานอยู่ใน 1 ใน 8 สถานะเท่านั้น ค่า Space Vector ของแรงดันที่ได้จากการคำนวณจะต้องนำมาแตกให้อยู่ในแกนของ Space Vector 2 ชุดที่อยู่ใกล้กัน ยกตัวอย่างเช่น Space Vector ของแรงดันในรูปที่ 3 สามารถแตกได้เป็น Va และ Vb ตามแนวของ
ช่วงเวลาระหว่าง ![]() ซึ่งหาค่าได้จาก
ซึ่งหาค่าได้จาก

ช่วงเวลาที่เหลือใน 1 คาบ 
 เป็นของเวกเตอร์ศูนย์ตามสมการ
เป็นของเวกเตอร์ศูนย์ตามสมการ

โดยแบ่งเป็นของ ![]() อย่างละครึ่งเพื่อให้สมมาตรกันทำให้ฮาร์มอนิคส์ของรูปคลื่นขาออกมีน้อยที่สุด หลักการ PWM แบบ space vector มีข้อดีคือให้ความถี่คงที่และมีกระแสกระเพื่อมน้อย แต่ก็แลกมาด้วยต้องใช้พลังคำนวณสูงมาก
อย่างละครึ่งเพื่อให้สมมาตรกันทำให้ฮาร์มอนิคส์ของรูปคลื่นขาออกมีน้อยที่สุด หลักการ PWM แบบ space vector มีข้อดีคือให้ความถี่คงที่และมีกระแสกระเพื่อมน้อย แต่ก็แลกมาด้วยต้องใช้พลังคำนวณสูงมาก
อินเวอเตอร์แบบ Soft-Switching
หลักการของ Soft Switching คือการใช้วงจรเรโซแนนซ์ปรับรูปคลื่นกระแสหรือแรงดัน เพื่อให้อุปกรณ์อิเล็กทรอนิกส์กำลังทำงานที่กระแสศูนย์ (Zero-Current Switching) หรือทำงานที่แรงดันศูนย์ (Zero-Voltage Switching) เพื่อทำให้กระแสหรือแรงดันเหลื่อมกันน้อยที่สุดในขณะมีการสวิตซ์เพื่อลดความสูญเสีย
อินเวอเตอร์แบบ Soft Switching มีข้อดีดังนี้
- ลดความสูญเสียขณะสวิตซ์ในอุปกรณ์อิเล็กทรอนิกส์กำลัง เพิ่มประสิทธิภาพของระบบโดยรวม
- ไม่ต้องใช้ Heat Sink ขนาดใหญ่และใช้วงจร Snubber เล็กลง ทำให้ขนาดและน้ำหนักของอินเวอเตอร์ลดลงเป็นอย่างมาก
- เนื่องจากผลของ dv/dt น้อยลง ทำให้ปัญหาด้าน EMI น้อยลงมากและความเค้นของฉนวนลดลง
- ลดมลพิษทางเสียงลงเนื่องจากใช้ความถี่สูง
แต่ก็ใช่ว่าจะมีข้อดีอย่างเดียว ยังมีข้อเสียด้วยดังนี้
- ความซับซ้อนของวงจรและระบบควบคุมมากขึ้น
- ความเชื่อถือได้ของระบบลดลง
- การเพิ่มวงจรเรโซแนนซ์ ทำให้วงจรแพงขึ้นและความสูญเสียสูงขึ้น
มีงานวิจัยเรื่องอิเล็กทรอนิกส์กำลังจำนวนมากที่เกี่ยวข้องกับการพัฒนาอินเวอเตอร์แบบ Soft Switching สำหรับมอเตอร์เหนี่ยวนำโดยมีการนำเสนอหลากหลายวิธีการโดยสรุปจะแบ่งเป็นชนิด DC-Link และ AC-Link ชนิด DC-Link แบ่งเป็นชนิด Resonant และ Nonresonant จุดเริ่มต้นของอินเวอเตอร์แบบ Soft Switching เริ่มต้นขึ้นจากงานวิจัยเมื่อปี 1986 ของ Devan หัวข้อเรื่อง ‘Three-Phase Voltage-Fed resonant DC-link Inverter’ และต่อจากนั้นก็มีงานวิจัยในเรื่องนี้ต่อ ๆ กันมาอีกเป็นจำนวนมากซึ่งเพื่อน ๆ สามารถค้นหาได้จากอินเตอร์เน็ตครับ สำหรับระบบขับเคลื่อนยานยนต์ไฟฟ้านั้น เป้าหมายในการพัฒนามีเงื่อนไขต่าง ๆ ดังนี้
- ประสิทธิภาพต้องมากกว่า 95%
- ความหนาแน่นของกำลังไม่น้อยกว่า 3.5 วัตต์ต่อตารางเซนติเมตร
- ความถี่ในการสวิตซ์มากกว่า 10 kHz
- dv/dt ต่ำกว่า 1000 V/us
- ค่า EMI เป็นศูนย์
- ไม่เกิดความเสียหายขึ้นในช่วงอายุการใช้งาน
- มีระบบสำรองที่เรียกว่า Limp-Home
Limp-Home คืออะไรน่ะหรือครับ หากเป็นรถยนต์เครื่องยนต์สันดาปภายในโหมดนี้จะทำงานก็ต่อเมื่อเกิดความร้อนผิดปกติระบบจะตัดเข้า Limp-Home บังคับให้เครื่องยนต์ทำงานด้วยรอบเดินเบาเพื่อให้เราสามารถบังคับรถแบบคลานเป็นเต่าไปจอดข้างทางได้ครับ แต่ถ้าเป็นรถยนต์ไฟฟ้าโหมดนี้จะทำงานเมื่อเกิดความผิดพลาดของสัญญาณจากเซ็นเซอร์หรือซอฟแวร์ระบบจะตัดเข้า Limp-Home เพื่อให้เราสามารถบังคับรถไปจอดข้างทางได้ครับ
อินเวอเตอร์ที่ผ่านเงื่อนไขตามที่ได้กล่าวมาแล้วทั้งหมดข้างต้นคือ อินเวอเตอร์แบบ Auxilliary Resonant Snubber (ASR) เป็นอินเวอเตอร์ที่เคยมีการทดสอบกันว่าสามารถใช้กำลังได้มากถึง 100 kW
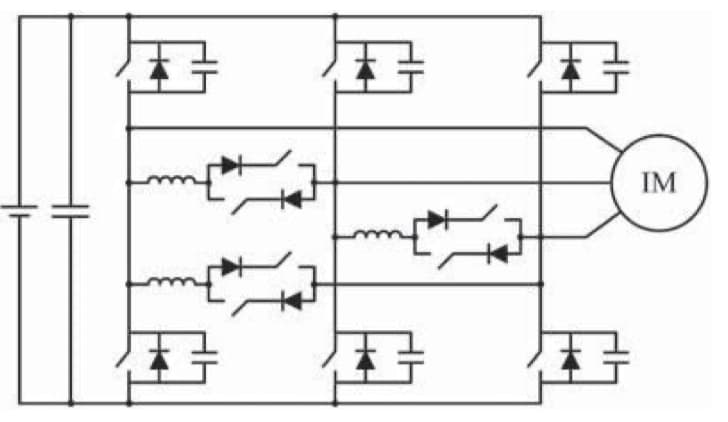
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
วงจรอย่างง่ายของอินเวอเตอร์แบบ ARS แสดงดังรูปที่ 5 มีการใช้สวิตซ์เพื่อตัดต่อวงจร Snubber Capacitor เพื่อควบคุมให้เกิด Soft Switching โดยทำให้สวิตซ์อิเล็กทรอนิกส์กำลังทำงานที่สภาวะแรงดันเป็นศูนย์ (ZVS) และสวิตซ์อิเล็กทรอนิกส์กำลังตัดต่อ Resonant Inductor ทำงานที่สภาวะกระแสเป็นศูนย์ (ZCS) โดยต้องคำนึงถึง Parasitic Inductance และ Stray Capacitance ในวงจรด้วยเพื่อทำให้เกิดแรงดันเกินหรือกระแสเกินต่อสวิตซ์กำลังให้น้อยที่สุด
แม้จะดูเหมือนว่าอินเวอเตอร์แบบ ARS จะเหมาะสำหรับนำมาใช้ในระบบขับเคลื่อนยานยนต์ไฟฟ้าก็ตามแต่ก็ยังมีปัญหาที่ต้องทำงานวิจัยพัฒนากันอย่างต่อเนื่องอีกโดยเฉพาะในเรื่องการลดความซับซ้อนของระบบควบคุม
ในการออกแบบยานยนต์ไฟฟ้านั้นต้องคำนึงถึงปัจจัยหลักคือความซับซ้อนของระบบและเสถียรภาพของระบบเป็นสำคัญ ยานยนต์ไฟฟ้าที่ขายอยู่ในปัจจุบันจึงยังไม่มีผู้ผลิตรายใดนำเอาระบบ Soft Switching มาใช้กับระบบขับเคลื่อนดังที่ได้กล่าวมาแล้ว
ใน EP.08 จะกล่าวถึงวิธีการควบคุมมอเตอร์เหนี่ยวนำและหลักเกณฑ์สำคัญที่นำมาพิจารณาในการออกแบบไดร์ฟมอเตอร์เหนี่ยวนำสำหรับยานยนต์ไฟฟ้ากันต่อครับ ก็หวังว่าเพื่อน ๆ ชาว Modern Manufacturing จะยังไม่เบื่องานเขียนอันยืดยาวของผมเสียก่อนนะครับ