การใช้วีธีสื่อสารตามธรรมชาติ เช่น เสียงพูด และท่าทาง สำหรับสร้างโปรแกรมทำงานของหุ่นยนต์ด้วยลักษณะการทำงานในเชิงโต้ตอบ ช่วยให้การทำโปรแกรมของหุ่นยนต์ไม่เพียงแต่สามารถทำได้อย่างรวดเร็วและง่ายดาย ด้วยการสาธิตการทำงานโดยใช้การเคลื่อนไหวแบบ 3 มิติเท่านั้น หากแต่ยังสามารถจำลองการเคลื่อนที่ของหุ่นยนต์ได้จากอุปกรณ์แบบเคลื่อนที่ได้ ทั้งนี้ ผู้ใช้งานจะได้รับการสนับสนุนการทำงานลักษณะนี้จาก PC-Tablet ร่วมกับแอพพลิเคชั่นที่ชาญฉลาด

นอกเหนือจากการลดต้นทุนและการลดเวลาในการทำงานลงแล้ว การเปลี่ยนแปลงสภาพของประชากร และการขาดแคลนแรงงาน ถือว่าเป็นปัจจัยที่เพิ่มความท้าทายให้กับการวางแผนงาน การจัดทำโปรแกรม และการบำรุงรักษาให้กับระบบงานผลิต โดยเฉพาะอย่างยิ่งในประเทศอุตสาหกรรมตะวันตก ระบบช่วยงานที่ชาญฉลาด (Intelligent Assistance System) จะช่วยให้กระบวนการทำงานด้วยมือได้รับการออกแบบให้ทำงานได้อย่างมีประสิทธิภาพสูงขึ้น มีความเหมาะสมด้านการยศาสตร์มากขึ้น

สำหรับหุ่นยนต์อุตสาหกรรมนั้น การโปรแกรมแบบออนไลน์ด้วยมือนับเป็นกระบวนการที่ค่อนข้างวิกฤตมักจะเกิดคอขวดขึ้น เนื่องจากเวลาที่ต้องใช้และความซับซ้อนของกระบวนการจัดทำโปรแกรม ทำให้ผู้ประกอบการโดยเฉพาะผู้ประกอบการขนาดเล็กและขนาดกลาง (SME) จึงยังคงชะลอการลงทุนกับหุ่นยนต์อุตสาหกรรม ทั้งนี้ ได้มีการยืนยันจากผลจากการศึกษาซึ่งได้รับการมอบหมายจากคณะกรรมการ ‘European Union on Robotic Application’ ที่ได้มีการเผยแพร่เมื่อไม่นานนี้ [1] ผลการศึกษานี้ได้มีการระบุว่า การทำงานแบบปฏิสัมพันธ์กันระหว่างมนุษย์และหุ่นยนต์เป็นเทคโนโลยีสำคัญ มีศักยภาพสูง สำหรับการนำมาใช้งานและการช่วยผลักดันให้การทำโปรแกรมใช้งานสำหรับหุ่นยนต์เป็นเรื่องง่ายสำหรับทุกคน งานวิจัยและพัฒนาเพื่อที่จะรองรับเทคโนโลยีสำหรับการทำงานลักษณะดังกล่าว จะเป็นการพัฒนาเทคนิคการโปรแกรมรูปแบบใหม่ ที่จะจัดเตรียมสำหรับสื่อสารกับระบบทางเทคนิคให้ได้อย่างเหมาะสมที่สุด
การสื่อสารแบบธรรมชาติทำให้ง่าย เร็ว และมีความยืดหยุ่น
การใช้ช่องทางการสื่อสารแบบธรรมชาติ ทำให้สามารถจัดทำการทำงานแบบปฏิสัมพันธ์ ระหว่างคนกับเครื่องจักร (Man-Machine-Interaction, MMI) ได้อย่างเหมาะสมตรงกับการนำมาใช้งาน ทั้งด้านของประสิทธิภาพและด้านของกายรศาสตร์ ทั้งนี้ ต้นแบบจะมาจากการสื่อสารระหว่างมนุษย์กับมนุษย์ ที่ส่วนใหญ่แล้วจะใช้ภาษาพูด (Auditory) และกริยาท่าทาง (Visual) เป้าหมายสำคัญของการรับรู้โดยการใช้ช่องทางการสื่อสารแบบธรรมชาติ นอกเหนือจากการทำให้ระบบทางเทคนิคได้รับการยอมรับเพิ่มขึ้นแล้ว โดยทั่วไปยังทำให้เวลาสำหรับใช้ในการเรียนรู้ และเวลาของวงรอบการทำงานลดลง ตามปกติ MMI ลักษณะธรรมชาติจะเป็นแบบ ‘Multimodality’ นั่นก็คือ การรับรู้จะใช้ช่องทางการสื่อสารหลายช่องทางพร้อมกันหรือต่อเนื่องกัน
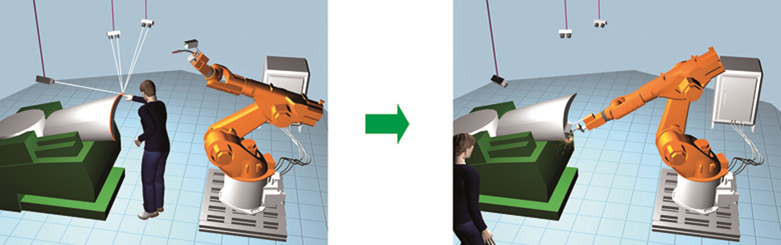
ระบบควบคุมที่เป็น Multimodal (Multimodal Control System) โดยทั่วไปนั้นจะใช้ลักษณะท่าทางการเคลื่อนไหวของนิ้วมือ มือ หรือการสัมผัส การรวมภาษาสำหรับ ‘การมองเห็น’ (Visualisation) เข้ามานั้น จะเป็นอีกรูปแบบหนึ่งที่ถูกนำมาใช้เพื่อการทำงานแบบปฏิสัมพันธ์ระหว่างคนและเครื่องจักร การแสดงผลนั้นนอกจากเทคนิคการแสดงผลที่ใช้กันอยู่เดิมแล้ว ยังมีการใช้วิธี ‘ความจริงเสริม (Augmented Reality : AR)’ สำหรับการแสดงภาพเสมือนจากข้อมูลจากคอมพิวเตอร์ร่วมอยู่ในภาพจริงที่ได้จากกล้อง (รูปที่ 1)
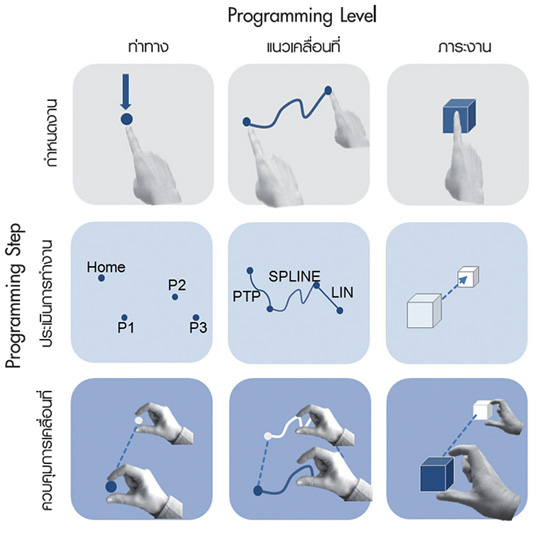
โครงการ ‘Spatial Programming for Industrial Robots’ ของภาควิชา ‘Industrial Automation Technology’ จากมหาวิทยาลัยวิศวกรรมศาสตร์เมือง Berlin ประเทศสหพันธ์สาธารณรัฐเยอรมัน ได้ถูกจัดทำขึ้นโดยมีเป้าหมายเพื่อพัฒนาวิธีการแบบธรรมชาติสำหรับ MMI เพื่อสนับสนุนการทำ Manual Online – Programming สำหรับหุ่นยนต์อุตสาหกรรม โดยจะมีระบบโปรแกรมสมรรถะสูง ประกอบด้วยระดับการโปรแกรม (Programming Level) หลายระดับ และขั้นตอนการทำโปรแกรมต่างๆ (Definition, Evaluation, Manipulation) (รูปที่ 2) ในโครงการนี้นอกเหนือจากการใช้ท่าทางการเคลื่อนไหวเพื่อ ‘กำหนดงาน (Definition)’ และ ‘ควบคุมการเคลื่อนที่ ( Manipulation )’ ให้กับโปรแกรมแล้ว ยังมีการใช้ความจริงเสริม (AR) บนอุปกรณ์แบบเคลื่อนที่ได้เพื่อ ‘ประเมินการทำงาน (Mobile Evaluation)’ ของโปรแกรมสำหรับหุ่นยนต์
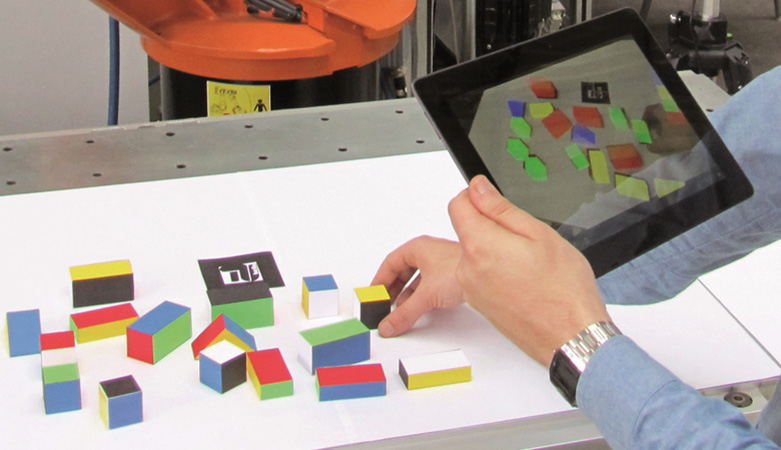
อุปกรณ์แบบเคลื่อนที่ได้ เช่น สมาร์ทโฟน Tablet – PC จะทำหน้าที่เป็น Control Programming Devices จากรูปที่ 3 แสดงภาพของหลักการทำงานแบบปฏิสัมพันธ์กัน ระหว่างลักษณะการเคลื่อนไหวที่เชื่อมโยงกับการ ‘กำหนดงาน’ให้กับโปรแกรมของหุ่นยนต์ และภาพที่แสดงด้วยการใช้ AR บนเครื่อง Tablet- PC รูปแบบการโปรแกรมหุ่นยนต์ 3 มิติ แบบทำงานปฏิสัมพันธ์กัน ถูกเรียกว่า ‘Spatial Programming for Industrial Robots’ [2] ด้วยโครงสร้างแบบโมดูลของระบบโปรแกรม ทำให้มั่นใจได้ถึงความยืดหยุ่นในการปรับลด สามารถปรับแต่งให้เหมาะสมตรงกับความต้องการเฉพาะสำหรับการใช้งานแต่ละด้าน เมื่อพิจารณาถึงการใช้อุปกรณ์ประกอบ เช่น เซ็นเซอร์ราคาต่ำ ใช้การอินเตอร์เฟสที่เป็นมาตรฐาน จึงประกันได้ถึงความสามารถที่จะรองรับการใช้งานของผู้ประกอบการ SME ทั่วไปได้อย่างหลากหลาย
ด้วยการใช้เทคนิค ‘ติดตามการเคลื่อนไหว (Motion Tracking)’ ทำให้สามารถ ‘กำหนดงาน’ ให้กับโปรแกรมได้อย่างง่ายดาย ด้วยการเคลื่อนไหวแบบ 3 มิติตามธรรมชาติ เช่น การใช้มือชี้ตำแหน่ง ลักษณะการทำงานจะแตกต่างกับวิธีการโปรแกรมมาตรฐานที่ใช้อยู่ เช่น การ ‘Teach-in’ เพราะการ ‘กำหนดงาน’ นี้สามารถที่จะทำการกำหนด ‘ท่าทาง (ตำแหน่งและทิศทาง: Pose)’ กำหนด ‘แนวเคลื่อนที่ (Trajectory)’ ได้หลายครั้ง หรือแม้กระทั่งกำหนดขั้นตอนทั้งหมดของ ‘ภาระงาน (Task)’ ได้ในระยะเวลาที่สั้นกว่า เพราะไม่จำเป็นต้องให้หุ่นยนต์เคลื่อนที่ ซึ่งจะเสียเวลามากกว่า
ข้อมูลตำแหน่งของมือแบบ 3 มิติ จะถูกส่งให้กับแอพพลิเคชั่นที่อุปกรณ์แบบเคลื่อนที่ได้ด้วยวิธีการแบบไร้สาย และจะถูกนำไปใช้ประเมินค่าสำหรับการจัดทำโปรแกรมต่อไป สำหรับแนวความคิดต่างๆ เกี่ยวกับการโปรแกรมหุ่นยนต์อุตสาหกรรมด้วย ‘การกำหนดลักษณะการเคลื่อนไหวแบบไม่ใช้เครื่องหมาย Markerless Gesture-Based’ นั้น ผู้เขียนเรื่องได้มีการเรียบเรียงไว้ในบรรณานุกรม [3]
ความจริงเสริม: การจำลองในสภาพแวดล้อมจริง
การ ‘กำหนดงาน’ ที่เพิ่มเติมจากการกำหนดแต่ละ ‘ท่าทาง’ และแต่ละ ‘แนวเคลื่อนที่’ ก็คือการที่ผู้ใช้งานสามารถที่จะกำหนด ‘ภาระงาน (Task)’ ทั้งหมดได้จากระดับการโปรแกรมที่สูงขึ้น ด้วยการสาธิตภาระงาน (Task Demonstration) โดยขั้นตอนของการทำงานอัตโนมัติตามอย่างที่มนุษย์ทำ จะถูกรับรู้ด้วยข้อมูลของระบบติดตามการเคลื่อนไหว และท้ายที่สุดถูกเปลี่ยนให้เป็นโปรแกรมสำหรับหุ่นยนต์ การทำโปรแกรมด้วย ‘ภาระงาน’ นี้ ไม่จำเป็นต้องใช้ความรู้ความเชี่ยวชาญเป็นพิเศษ จึงเป็นเรื่องง่ายสำหรับผู้ใช้งาน สำหรับการรับรู้ลักษณะการเคลื่อนไหวแบบไม่ใช้เครื่องหมายนั้น สามารถจะใช้ได้ทั้งระบบกล้อง 3 มิติภายนอก หรือทั้งกล้องแบบ 2 มิติ ที่มีอยู่กับอุปกรณ์แบบเคลื่อนที่ได้ การรับรู้ลักษณะการขยับนิ้วมือนั้น จะใช้อัลกอริธึมพิเศษสำหรับกระบวนการจัดการกับอิมเมจที่มีอยู่ที่ตัวอุปกรณ์แบบเคลื่อนที่ได้
แอพพลิเคชั่นที่อุปกรณ์แบบเคลื่อนที่ได้นั้น ไม่ใช่ใช้เฉพาะเพียงแค่การจัดการกับโปรแกรมเท่านั้น แต่จะสนับสนุนการทำโปรแกรมด้วยการประเมินผลการทำงานที่จะได้จากหุ่นยนต์อุตสาหกรรม โดยใช้เทคนิคความจริงเสริมมาช่วย ทั้งนี้ภาพจากกล้องของอุปกรณ์แบบเคลื่อนที่ได้ จะมาเพิ่มเป็นสภาพแวดล้อมของวัตถุเสมือนที่มาจากโปรแกรมของหุ่นยนต์อุตสาหกรรม ทำให้โปรแกรมสำหรับหุ่นยนต์ที่ปกติแล้วจะอยู่ในรูปแบบของข้อความตัวอักษร ถูกทำให้เห็นภาพการทำงานที่เกิดขึ้นกับสภาพแวดล้อมจริง ผู้ใช้งานที่อาจจะไม่มีความรู้ในเชิงลึกจึงสามารถเข้าใจได้โดยทันที

การทำแบบจำลองของ ‘แบบจำลองหุ่นยนต์เสมือน’ เป็นการเพิ่มความสามารถในลักษณะเดียวกับที่ระบบโปรแกรมแบบออฟไลน์ได้รับการสนับสนุนจากระบบ CAD ในการจำลองการทำงานของโปรแกรมสำหรับหุ่นยนต์ เพื่อหาค่าเวลาของวงรอบทำงาน และหาขอบเขตการควบคุมการเข้าถึง ควบคุมการชน รูปที่ 4 แสดงการกำหนด ‘ท่าทาง’ ด้วยวิธีการรับรู้ลักษณะการเคลื่อนไหว ตามมาด้วยการจำลองการทำงานของโปรแกรม และท้ายสุดการทำงานของโปรแกรมที่ชุดควบคุมตัวหุ่นยนต์ การจำลองการทำงานของหุ่นยนต์ในสภาพแวดล้อมจริง สามารถทำได้ด้วยหุ่นยนต์เสมือนที่ปรากฎอยู่ในภาพจากกล้องที่จัดวางไว้บนหุ่นยนต์ตัวจริง

โปรแกรมสำหรับหุ่นยนต์ที่สามารถสัมผัสและปรับให้เหมาะสมได้
ด้วยลักษณะการทำงานแบบปฏิสัมพันธ์กัน การใช้เทคโนโลยีความจริงเสริมทำให้ผู้ใช้งานมองเห็นผลตอบรับที่เกิดจากการเคลื่อนไหว สารสนเทศต่างๆ ที่เกิดขึ้นจากโปรแกรมของหุ่นยนต์ในเวลานั้น จะถูกนำออกแสดงร่วมในภาพจากกล้องของ Tablet-PC พร้อมกันกับการเคลื่อนไหวต่างๆ ของผู้ใช้
รูปแบบใหม่ของการทำงานแบบปฏิสัมพันธ์กับการรับรู้ลักษณะการเคลื่อนไหวของนิ้วมือ คือ การที่ผู้ใช้สามารถที่จะจับ ‘วัตถุเสมือน’ จากความจริงเสริม ที่มีการสนธิเข้ากับสภาพแวดล้อมจริง หมายความว่า สามารถเคลื่อนไหวได้อย่างอิสระในสามมิติ ทั้งการเคลื่อนที่เชิงเส้น การหมุน วัตถุเสมือนนี้อาจเป็นได้ทั้งที่มาจากการ ‘กำหนดงาน’ สำหรับแต่ละ ‘ท่าทาง’ สำหรับแต่ละ ‘แนวเคลื่อนที่’ หรือสำหรับ ‘ภาระงาน’ ในขณะที่มีการทำงานแบบปฏิสัมพันธ์กับผู้ใช้ จะมีการสร้างภาพที่เกิดจากการทำงานร่วมกันนี้ ด้วยการใช้ความจริงเสริมให้เห็นไปพร้อมกัน และท้ายสุดโปรแกรมของหุ่นยนต์จะปรับการเคลื่อนที่ตามลักษณะท่าทางการเคลื่อนไหวนี้โดยอัตโนมัติ รูปที่ 5 แสดงถึงปฏิกริยาโต้ตอบระหว่างชิ้นงานเสมือนและชิ้นงานจริง สำหรับการกำหนดภาระงาน Pick-and-Place
ในขณะนี้ได้มีแผนงานที่จะปรับโมเดลการทำโปรแกรมตามภาระงาน สำหรับงานเชื่อมด้วยการใช้หุ่นยนต์อุตสาหกรรม รูปที่ 6 แสดงภาพสเก็ตช์ของหลักการโปรแกรมด้วยการสาธิตภาระงาน การชดเชยผลจากความคลาดเคลื่อนของระบบติดตามการเคลื่อนไหว ที่อาจเกิดขึ้นได้ขณะกำหนดแนวเดินด้วยวิธีการรับรู้ลักษณะการเคลื่อนไหว จะทำโดยใช้เซ็นเซอร์เพื่อหาตำแหน่งตะเข็บรอยต่อ และใช้เพี่อการเดินแนวเชื่อมตามรอยได้อย่างถูกต้อง
การปรับแต่งอัตโนมัติ เพื่อช่วยให้มีความพร้อมใช้งานเร็วขึ้น
จากพื้นฐานการตรวจจับโดยใช้กล้องสำหรับใช้งานกับระบบติดตามการเคลื่อนที่ ได้มีการพัฒนาวิธีการปรับแต่งอัตโนมัติสำหรับ ‘การติดตามการเคลื่อนไหว’ และสำหรับ ‘ความจริงเสริม’ วิธีการปรับแต่งอัตโนมัตินี้ทำให้สามารถรับรองได้ว่า การนำระบบโปรแกรมนี้มาใช้งานเป็นครั้งแรกนั้น จะสามารถทำได้อย่างรวดเร็ว มีความพร้อมใช้งานในเวลาเพียงไม่กี่นาที
ส่วนประกอบหลักของ Spatial Programming System คือ แอพพลิเคชั่นที่สามารถใช้งานได้กับอุปกรณ์แบบเคลื่อนที่ได้ ได้แก่ สมาร์ทโฟน Tablet-PC ที่ใช้กันอยู่ทั่วไป การเชื่อมโยงผ่านทางอินเตอร์เฟสมาตรฐาน ทำให้โปรแกรมของหุ่นยนต์จากแอพพลิเคชั่น สามารถส่งไปที่ชุดควบคุมหุ่นยนต์ของผู้ผลิตต่างๆ ได้ทุกราย [4] ในอนาคตอันใกล้นี้จะมีการพัฒนาอินเตอร์เฟสแบบไร้สาย เพื่อเตรียมไว้สำหรับแลกเปลี่ยนโปรแกรมกับ Simulation Tools รุ่นที่มีใช้กันอยู่เดิมของ ‘โรงงานแบบดิจิตอล’
Reference:
[1] Forge, S. und C. Blackman: A helping hand for Europe: the competitive outlook for the EU robotics industry . Marktstudie des Institute for Prospective Technological Studies, European Commission’s Joint Research Centre, Luxemburg 2010.
[2] Lambrecht, J. und J. Krüger: Spatial programming for industrial robots based on gestures and augmented reality. International conference on intelligent robots and systems, 2012.
[3] Lambrecht, J.; Kleinsorge, M. und J. Krüger : Markerless gesture-based motion control and programming of industrial robots. In: IEEE, 16thConference on emerging technologies factory automation, 2011.
[4] Lambrecht, J.; Chemnitz, M.und J. Krüger : Control layer for multi-vendor industrial robot Interaction providing integration of supervisory process control and multifunctional control units.In: 2011 IEEE-Conference on technologies for practical robot applications, 2011.
Source:
- นิตยสาร MM Machine Tools & Metalworking ฉบับเดือน กันยายน 2558
เรื่อง: Jens Lambrecht และJöerg Krueger แปล/เรียบเรียง: อิทธิเทพ อมาตยกุล


นำเสนอข่าวสารความรู้รอบด้านเกี่ยวกับอุตสาหกรรมการผลิต เพื่ออุตสาหกรรมไทยก้าวหน้าด้วยวิทยาการสมัยใหม่และเป็นแรงขับเคลื่อนเศรษฐกิจไทย