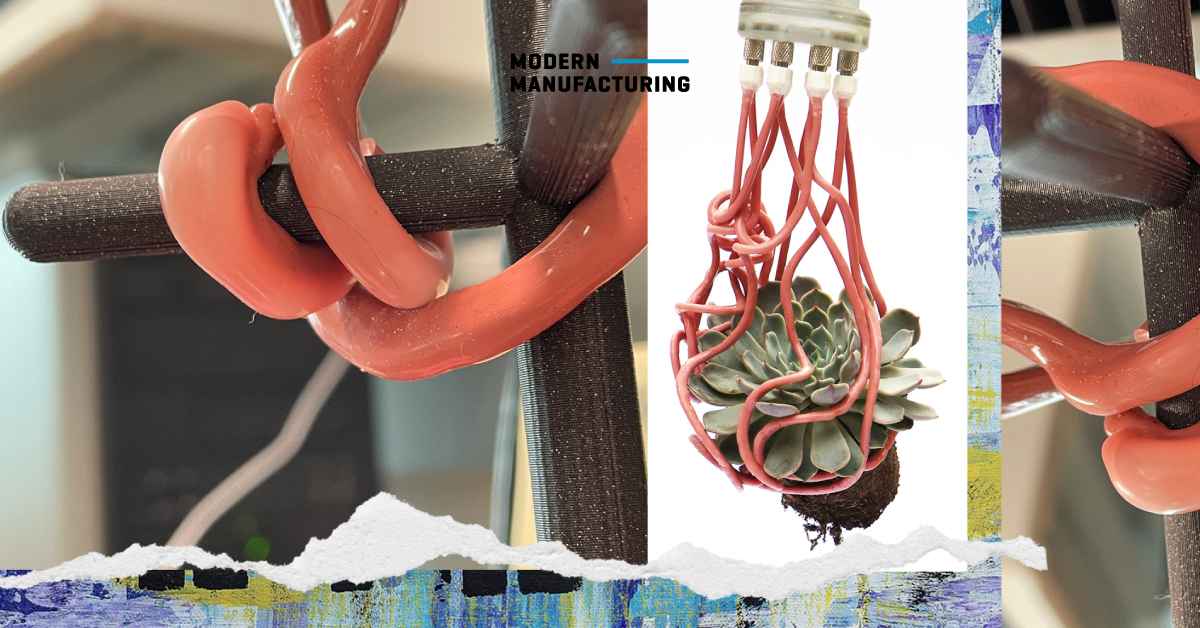
ทีมวิจัยจาก Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) ได้พัฒนา Gripper สำหรับหุ่นยนต์ในการหยิบจับวัสดุที่มีความอ่อนไหวบอบบาง ด้วยการออกแบบให้มีลักษณะเป็นเหมือนหนวดของสิ่งมีชีวิตอย่างหมึกหรือแมงกะพรุนนั่นเอง
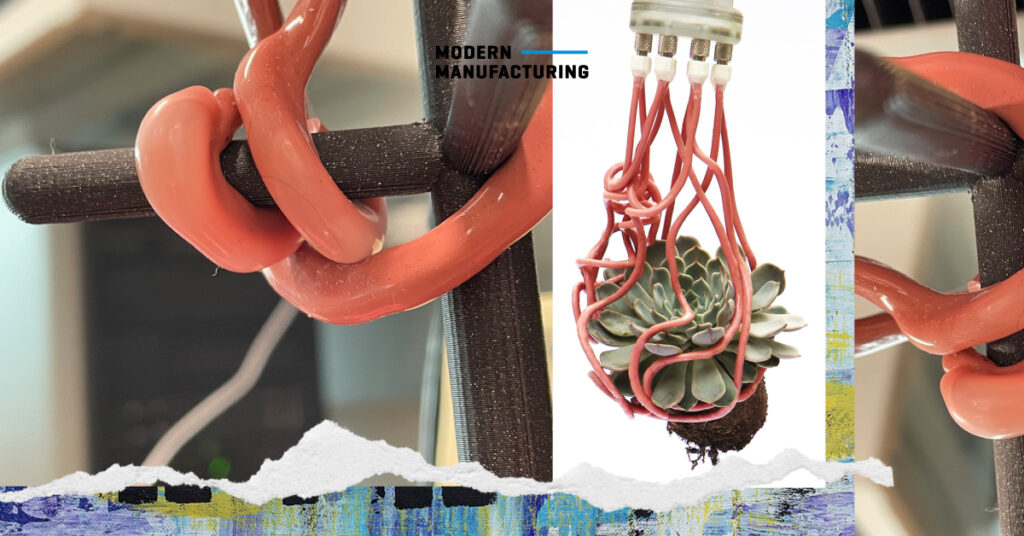
Gripper แบบใหม่นี้มีทั้งความแข็งแรงและสามารถปรับตัวได้จากความสามารถในการล้อมรัดตัวเองเข้ากับวัสดุที่ต้องการหยิบ โดยหนวดที่ยาวลงมานั้นมีลักษณะกลวงและทำมาจากวัสดุยางจึงมีความยืดหยุ่นสูง ดด้านหนึ่งของหนวดจะเป็นยางที่มีความหนาด้านกว่าอีกด้านหนึ่งของหนวดเส้นเดียวกัน ทำให้เมื่อหนวดได้รับแรงดันขึ้นมาจะงอตัวเป็นเหมือนกับหางหมูหรือสามารถยืดได้ตรงเหมือนเส้นผมในวันฝนตก
หนวดที่ขดนั้นจะพันรอบวัสดุและสามารถพันกันเองได้ ทำให้เพิ่มความสามารถในการยึดวัตถุเอาไว้และไม่สร้างความเสียหายให้กับวัสดุที่มีความอ่อนไหว เพื่อปล่อยวัสดุลงหนวดเหล่านี้จะถูกนำแรงดันออกจากภายใน
ที่มา:
seas.harvard.edu